We are happy to announce that our drone r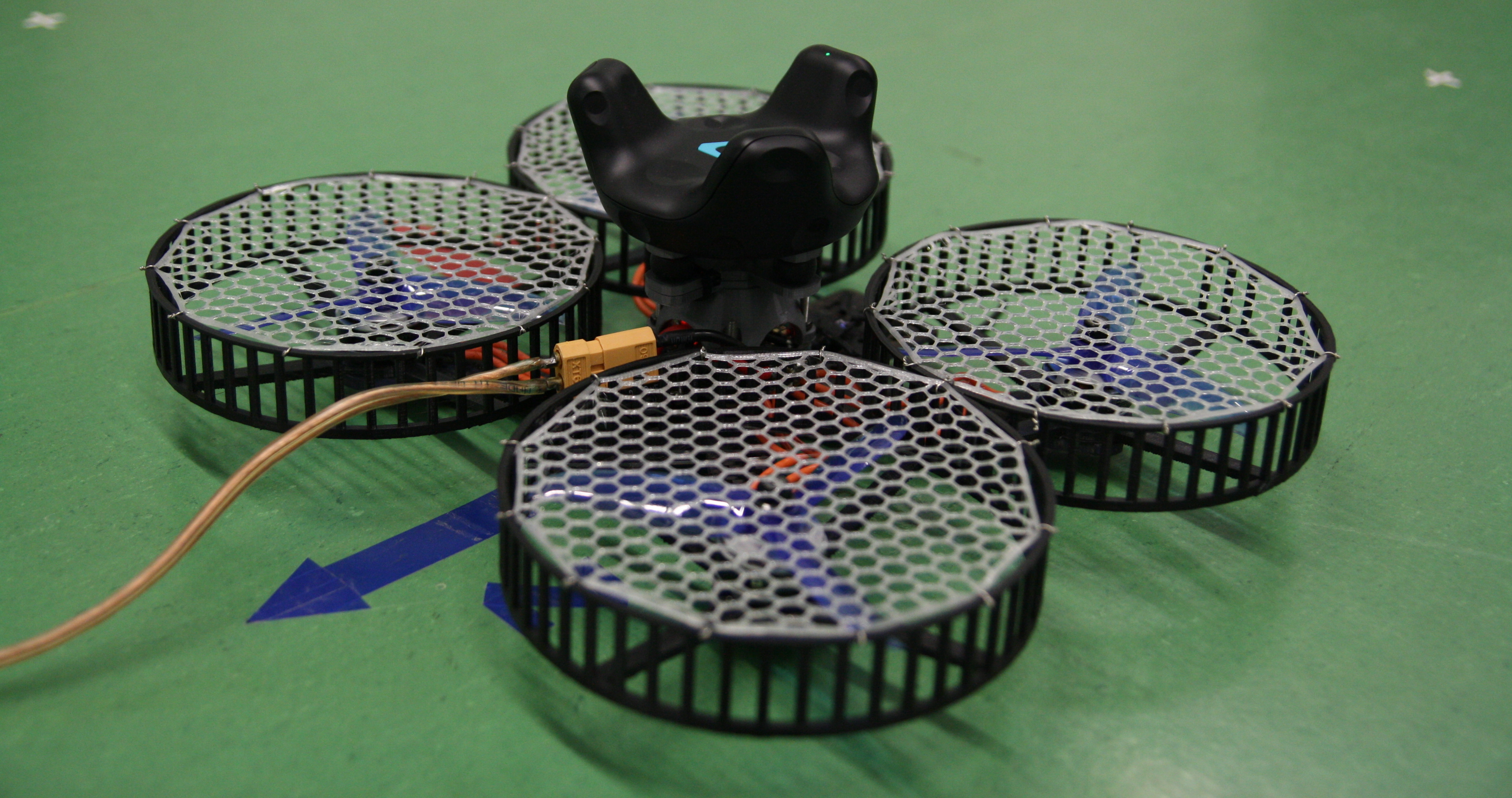 outine programming framework DronOS was published at the 18th international conference on mobile and ubiquitous media (MUM). Since we started our work in the domain of human-drone interaction, only few customizable drones were available. This required to either modify the controller of drones to send custom signals or use one of the frameworks which are provided by the vendors. However, we faced several drawback: first, our code worked only on a single drone that could not be transferred to other drone models. Second, we were not able change the communication modalities and depended effectively on the protocols provided by the vendors. Thus, we were forced to change and translate our code for other models. DronOS overcomes these drawbacks by using standardized open-source protocols that can be used by any available drone. DronOS goes even a step further and provides a Unity-based user interface for a simple programming of the drone and low cost tracking hardware using parts of the HTC Vive kit. We host our code on Github. Further information about the implementation and technical specification can be found in our paper.
outine programming framework DronOS was published at the 18th international conference on mobile and ubiquitous media (MUM). Since we started our work in the domain of human-drone interaction, only few customizable drones were available. This required to either modify the controller of drones to send custom signals or use one of the frameworks which are provided by the vendors. However, we faced several drawback: first, our code worked only on a single drone that could not be transferred to other drone models. Second, we were not able change the communication modalities and depended effectively on the protocols provided by the vendors. Thus, we were forced to change and translate our code for other models. DronOS overcomes these drawbacks by using standardized open-source protocols that can be used by any available drone. DronOS goes even a step further and provides a Unity-based user interface for a simple programming of the drone and low cost tracking hardware using parts of the HTC Vive kit. We host our code on Github. Further information about the implementation and technical specification can be found in our paper.


{kind=link}
{kind=link}
{kind=link}